Opening Ceremony
Chairman of Electrical Engineering department, and Others.
Due to recent developments in the region, including flight cancellations and travel constraints, the ACT-RS 2026 Spring School has been postponed.
The event will be rescheduled, and the new dates will be announced soon. All interested applicants will be contacted directly once further information becomes available.
We thank you for your understanding and continued interest.
Electrical Engineering Department / Interdisciplinary Research Center for Intelligent Manufacturing and Robotics
KFUPM, Dhahran, Saudi Arabia
Postponed (New Dates TBD)
✨ FREE participation
🎓 Certificates will be awarded to all attendees
The 1st Spring School on Advances in Control Technologies for Robotic Systems (ACT-RS 2026) is an international academic event hosted by the Control Group of the Electrical Engineering Department at King Fahd University of Petroleum and Minerals (KFUPM). The Spring School brings together undergraduate and graduate students, researchers, and faculty members for an immersive learning experience focused on cutting-edge control theories and their applications in modern robotic systems. Featuring high-level lectures by an internationally recognized expert, the program covers key topics such as underactuated and humanoid robotics, autonomous and underwater systems, wearable exoskeletons, and hands-on MATLAB/Simulink simulations. With interactive sessions, networking opportunities, and the exciting “My Thesis in 180 Seconds” competition, ACT-RS 2026 offers a unique platform to learn, connect, and engage with the future of robotics and automatic control.
Detailed insights into modern robotic systems.
Advanced control technologies and theories.
Graduate/undergraduate students, researchers, and professionals in control and robotics.

Senior Researcher, LIRMM, CNRS / University of Montpellier
Ahmed CHEMORI received his M.Sc. and Ph.D. degrees in Automatic Control from the Polytechnic Institute of Grenoble, France, in 2001 and 2005, respectively. During 2004–2005, he served as a Research and Teaching Assistant at the Laboratoire de Signaux et Systèmes (LSS, CentraleSupélec) and Université Paris-Sud (Paris 11). He then joined Gipsa-Lab (formerly LAG) as a CNRS postdoctoral researcher. He is currently a Senior CNRS Researcher in Automatic Control and Robotics at the French National Centre for Scientific Research (CNRS), affiliated with the Montpellier Laboratory of Computer Science, Robotics, and Microelectronics (LIRMM). His research interests include nonlinear control (adaptive, robust, and predictive) and its real-time applications in various areas of robotics, including parallel robotics, marine robotics, and wearable robotics. He is the author or co-author of more than 195 scientific publications, including journal articles, patents, books, book chapters, and conference proceedings. He has co-supervised 26 Ph.D. theses (including 21 successfully defended) and more than 40 M.Sc. theses. He is the Head of the Marine Robotics Team, and the Chair of the LIRMM Valorization Committee. He serves as Technical Editor for IEEE/ASME Transactions on Mechatronics and as Guest Editor for several special issues. He is an IEEE Senior Member and an IFAC member of Technical Committees TC1.2 (Adaptive and Learning Systems), TC4.2 (Mechatronic Systems), TC4.3 (Robotics), and TC7.2 (Marine Systems). He has also served as a TPC/IPC member and Associate Editor for several international conferences, including IEEE IROS, IEEE RO-MAN, IFAC ALCOS, IFAC CAMS, and the IFAC World Congress, among others, and has organized multiple scientific events.
All times are in Riyadh local time (UTC+3).
Chairman of Electrical Engineering department, and Others.
Simulation with Matlab/Simulink
Participation certificates, Awards ("My Thesis in 180s"), Closing Speech.
Robotics is an interdisciplinary branch of engineering that includes mechanical engineering, electrical engineering, computer engineering, control engineering and others. It deals with design, construction and use of robots, as well as computer systems for their control, sensory feedback, and information processing. It may overlap with different fields such as electronics, computer science, mechatronics, artificial intelligence, nanotechnology and bioengineering. Robotics was initially and for a long time guided by needs in industry. Indeed, the early years of robotics was largely focused on robotic manipulators, mainly used for simple and repetitive automation tasks. The first industrial robot manipulator appeared in 1961 in the assembly lines of General Motors. Year after year, the progress of robotics and automation, as well as their associated innovative applications, have been noticed every day through the consideration of more and more complex tasks needing higher performances; such as those for operating in dangerous and hazardous environments. These complex and challenging tasks require a deeply understanding of robotic systems in different points of view, including mechanical design, kinematic and dynamic modelling, sensing, actuation, control design, optimization, etc. Nowadays, robotics is highly advanced, including different fields and applications; namely industrial robotics, mobile robotics, bioinspired robotics, micro-robotics, humanoid robotics, aerial robotics, space robotics, marine robotics, medical robotics, service robotics, wearable robotics, etc. This talk will give an overview of most of these robotic fields through various videos illustrating needs, challenges and applications.
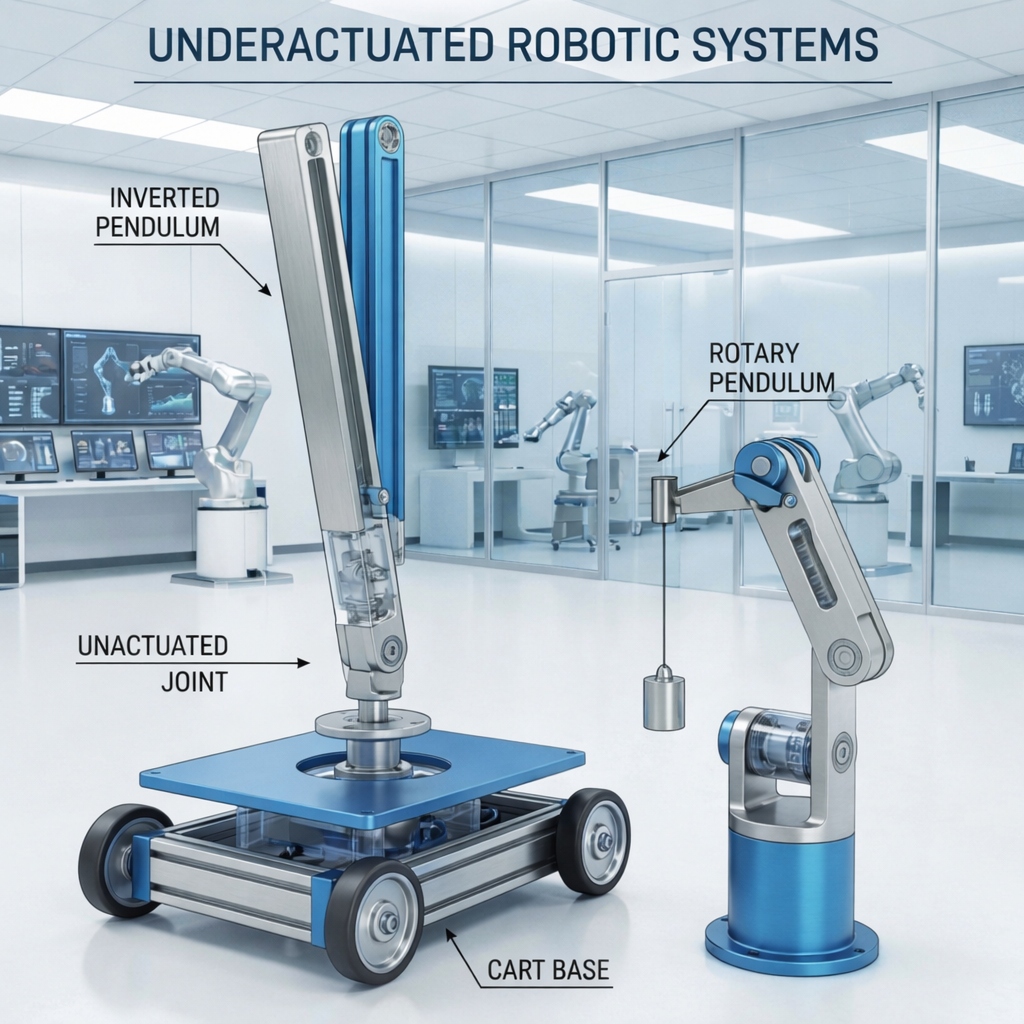
Underactuated mechanical systems are those systems with less control inputs than generalized coordinates (degrees of freedom) i.e they have generalized coordinates that are not actuated, and this is a source of dynamic constraints which are generally non integrable and therefore second order non-holonomic. Many examples of such systems exist, mainly in robotics, they include, among others, the underactuated robot manipulators, the gymnast robots and particularly the acrobot, the pendubot, the Planar Vertical Takeoff and Landing (PVTOL) aircrafts, some undersea vehicles and other mobile robots. Another basic feature of this class of systems is the nonlinear dynamics that they have; moreover their actuated coordinates are nonlinearly coupled with the unactuated coordinates. This talk deals with control of underactuated mechanical systems, where two main problems have been studied; the first one concerns stabilization around unstable equilibrium point, whereas the second one deals with stable limit cycle generation. The proposed control methods are illustrated through numerical simulations as well as real-time experiments on different examples of underactuated mechanical systems and mainly the inertia wheel inverted pendulum.

Serial robot manipulators consist of a set of sequentially connected links, forming an open kinematic chain. These robots are mainly characterized by their large workspace and their high dexterity. However, in order to perform tasks requiring high speeds/accelerations and high precision; such robots are not always recommended because of their lack of stiffness and accuracy. Indeed, parallel kinematic manipulators (PKMs) are more suitable for such tasks. The main idea of their mechanical structure consists in using at least two kinematic chains linking the fixed base to the travelling plate, where each of these chains contains at least one actuator. This allows for a distribution of the load between the chains. PKMs have important advantages with respect to their serial counterparts in terms of stiffness, speed, accuracy and payload. However, these robots are characterized by their highly nonlinear dynamics, actuation redundancy, kinematic redundancy, uncertainties, singularities, etc. Besides, when interested in high speed robotized repetitive applications, such as food packaging tasks, the key idea relies in looking for short cycle times. This talk will give an overview of some proposed advanced control solutions for high-speed applications of PKMs in food packaging tasks. The proposed solutions are mainly based on nonlinear adaptive control techniques and have been validated through real-time experiments on different prototypes.

Underwater vehicles have gained a widespread interest in the last decades, from various research communities (design, actuation, perception, modelling, control, etc), given the multiple tasks they can accomplish. Their applications are multiple and various in different fields such as dams’ inspection, oil and gas industry, fish farms, wind parks, hydroelectric power stations, underwater archeology, ocean cartography, air crash and environmental investigations, etc. Control of underwater vehicles is a thoroughly investigated subject but still an open research problem. Indeed, when we are interested in autonomous control of underwater vehicles (ROVs, AUVs, ASVs, bioinspired, etc) different control challenges may arise. They are mainly due to the inherent high nonlinearities and time varying behavior of their dynamics subject to hydrodynamic effects and environmental disturbances. This talk will be focused control challenges of small tethered underwater vehicles and some proposed control solutions. Different control solutions, mainly issued from adaptive control, will be then presented and discussed. All the proposed controllers will be illustrated through real-time experiments on different underwater vehicles.

The idea is to launch this competition at KFUPM for the first time. The “My Thesis in 180 Seconds” competition challenges PhD students to present their thesis topic in just three minutes, in a way that is engaging and understandable to a general audience. Each PhD student must deliver a clear, concise, and convincing presentation of their research project, using only one slide. This competition offers a unique opportunity for students to popularize the content and significance of their work for the general public, while developing communication skills that go far beyond a purely stylistic exercise. To support this challenge, participating PhD students benefit from dedicated training sessions designed to help them simplify their research and quickly capture the attention of an audience.
Walking gait control is one of the most important research problems in humanoid and wearable robotics. Indeed, when interested in walking gait control two inherent challenging issues may arise; namely pattern generation and control design. This presentation will be focused on the second challenge dealing with control design for dynamic walking. It will be organized around two main parts; the first one is a general introduction to humanoid robotics, including a brief its basic principles, before emphasizing the problem formulation involving the two above mentioned challenges. The second part will be devoted to walking gait control, where this problem is resolved through a human-data-based control architecture for pattern generation and dynamic walking control. The proposed method in this case deals with whole-body control, where a motion capture system is used to acquire the necessary data to reproduce human-like motions on a humanoid robot. However, unlike most of the techniques from the literature, where a big amount of data is used, only feet and CoM positions are needed to describe the the most relevant features of a human walking. The redundancy in the humanoid model is then considered to track these two objectives using task formalism. The proposed solution is validated through numerical simulations as well as real-time experiments on the humanoid robot HOAP3, for different motion scenarios

Assisting disabled and elderly people in daily activities using wearable devices has gained a particular interest these last decades due to the highly increasing rate of dependent people. The rise in life expectancy is set to continue; combined with the decrease in birth rates, this should accelerate more the aging of the population. Consequently, this will certainly have a great impact on the development of assistive wearable devices. Thanks to the latest advances in portable device technologies in terms of compact/miniaturized design, low cost and energy consumption, their wearability has known an important development. Indeed, human wearable devices such as exoskeletons, wearable bio-sensors and wearable stimulators are no more considered as fiction science. Furthermore, this field is attracting more and more researchers from different communities (mechanical design, sensors, actuators, control design, etc.) in the last decade. In terms of data measurement, different sensing systems are often used in wearable devices, namely EMG (muscular activities), IMU (human posture), Force sensors (contact with the ground), etc. This talk will be focused on wearables robotics challenges, recent advances in this field, and some proposed control solutions for exoskeletons. The proposed control solutions will be illustrated through numerical simulations as well as real-time experiments.
Application of some control schemes, learned in previous lectures, to robotic systems. The participants will have the choice among various subjects, including: - Control of a serial robotic manipulator - Control of an autonomous surface vehicle (USV) - Control of knee-joint exoskeleton - Control of an underactuated mechanical system - Etc.






Electrical Engineering Department
Dhahran 31261, Eastern Province, Saudi Arabia
Building 59
Room 2001 — Lectures | Room 1001 — My Thesis in 180 Seconds Competition